-
La mobilité du robot
Il y a plusieurs solutions techniques possibles pour assurer la mobilité d'un robot,
comme les roues, les jambes, les pattes et les chenilles.Chacune de ces solutions comportent
des avantages et des inconvénients.
Les roues permettent une grande mobilité; plus il y en a plus la stabilité est importante.



Les chenilles sont tout terrain, conviennent au sols boueux, sableux et avec de fortes pentes
mais leur coût est élevé.


Les jambes seront quant à elles plus efficace pour certaines tâches (tel que imiter la démarche humaine).
Elles sont cependant très onéreuses.


Les pattes permettent un meilleur équilibre à prix abordable.

 .
. 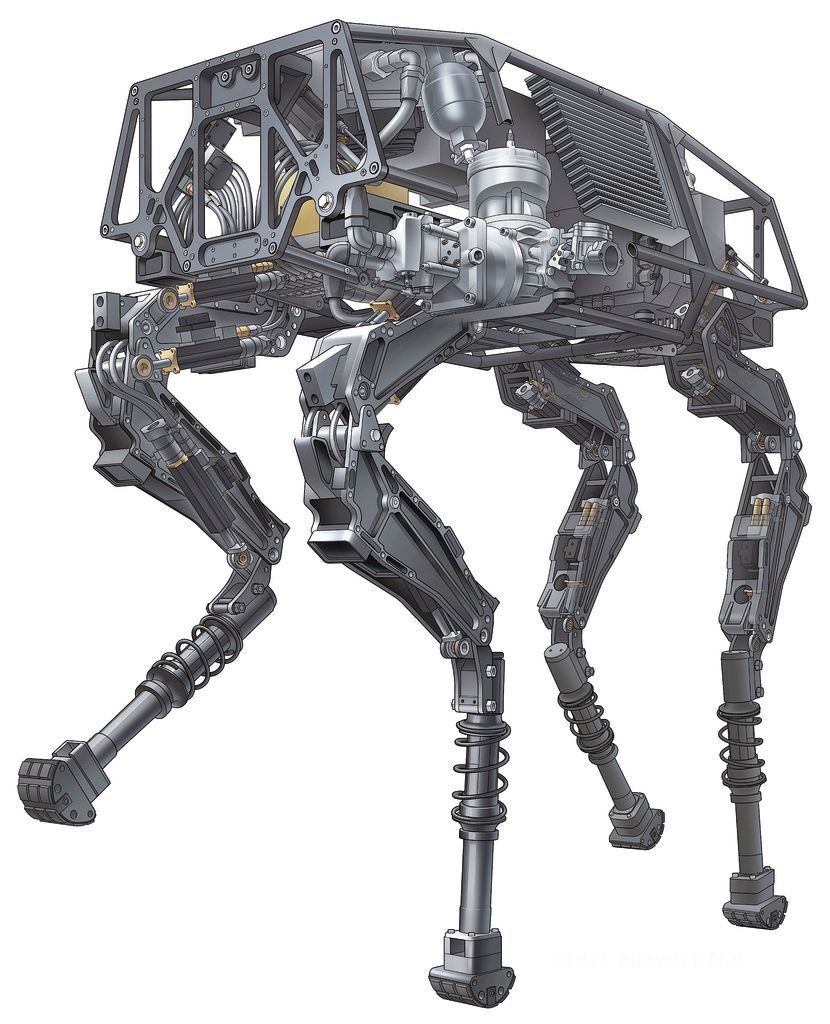
Mais elles sont moins mobiles et plus le nombre de pattes est élevé moins le robot sera complexe.
Lors de la conception d'un robot prévu pour se déplacer sur le sol, il faut prendre en compte les
critères suivants:
Le type de terrain : la nature du terrain sur lequel le robot se déplace ( plat, irrégulier, avec des bosses,
mou, glissant...)
La stabilité du robot : immobile ou en se déplacent, le robot doit être stable.
La vitesse du robot : la tenue de direction est liée à la vitesse de déplacement.
Sylvain et Lucas
-
Commentaires
|
|
|
|